Background
Factories in the actual production does not guarantee that the product is 100% perfect, or the articulated screws are not tightened, or small scratches on the surface, or product labels forget to paste ...... especially in the display, electronic products, automotive, aerospace and other industries, a seemingly insignificant defects or flaws, the light will lead to the enterprise's In particular, in the display, electronic products, automotive, aerospace and other industries, a seemingly insignificant defect or flaw may cause damage to the goodwill and property of the enterprise, or even lead to casualties. Therefore, the defect/defect detection process is very critical.
To this end, in October 2020 Future Robot launched the V510 series of vision and motion control solutions based on Intel Sky lake/Kaby lake/Coffee Lake platform + FPGA extensions, a solution with the advantages and features of powerful performance, open framework, reliability and ease of use, which can be used in real production scenarios represented by defect detection as the representative of the actual production scenario to obtain good results.

Relevant technologies
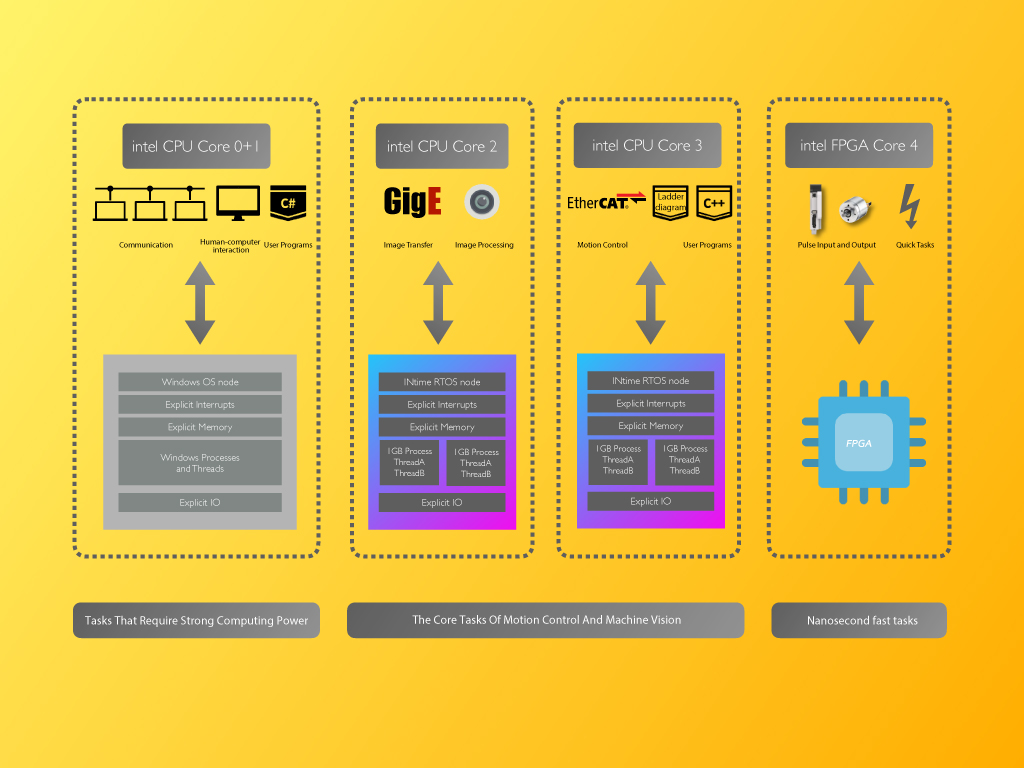
The V510 series controller supports Intel 6th, 7th, 8th and 9th generation CPUs and Cyclone4 and Cyclone10 FPGAs with flexible CPU configuration, DI/DO interface, light control interface and GbE LAN interface according to customer requirements.
In the V510 series controller from Future Robot, the user's PLC and C programs run in a real-time system (RTOS). This includes not only the user program, but also the EtherCAT protocol stack called in the user program, the motion control algorithms and other functional modules that need to run stably and respond quickly to ensure system stability and performance.
The V510 series controller introduces an open real-time environment that allows users to develop user programs directly in a high-level language. Unlike virtual machine technologies (hypervisors), Windows device drivers or microcontroller applications, the Real-Time System is a complete operating system with exclusive access to Intel CPU computing cores, memory, I/O and interrupts. Completely independent of Microsoft Windows, the Real-Time System is the fastest and safest option for responding to critical tasks.
Solution
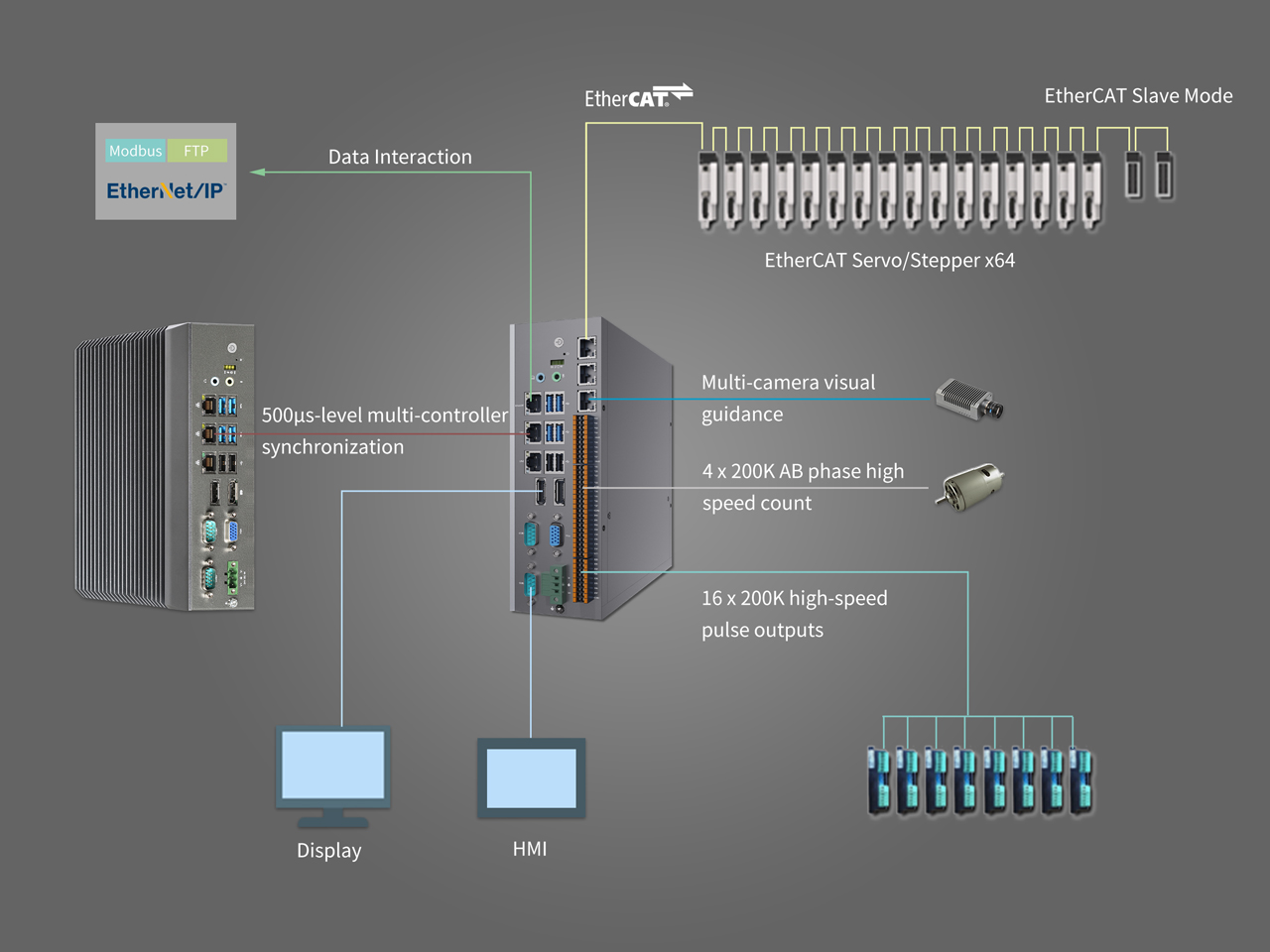
The V510 series controller supports EtherCAT masters, up to 64 axes of motion control and 128 EtherCAT slaves, EtherCAT control cycles up to 500 µs, and the most popular EtherCAT drivers and IOs.
In terms of motion control, the V510 series controller supports 2-axis planar interpolation, 3-axis spatial interpolation, electronic cams and other advanced motion control functions, T- and S-shaped speed curve planning, and continuous interpolation of up to four coordinate systems.
The V510 series controller solution with rich IO interfaces, built-in 64 high-speed IO, including up to 16 200KHz high-speed pulse outputs and 4 200KHz AB-phase high-speed counters, and 6 intel i21X series Gigabit Ethernet ports.
The V510 series controller supports common machine image algorithms for vision guidance and measurement applications in machine vision, with built-in alignment algorithms for common mechanical structures and user-defined point alignment algorithms.
Support PLC programming language: LD, C and ST, support C#, C++ and other high-level language program development, machine program independent of the real-time system, even if Microsoft Windows anomaly can be stable operation.
The V510 series controller uses flexible API function calls and combines the characteristics of high-level language development environments such as C# and C++ with PLC development environments and real-time systems to improve the operating logic and interface, allowing for easy establishment of fast and direct data links.
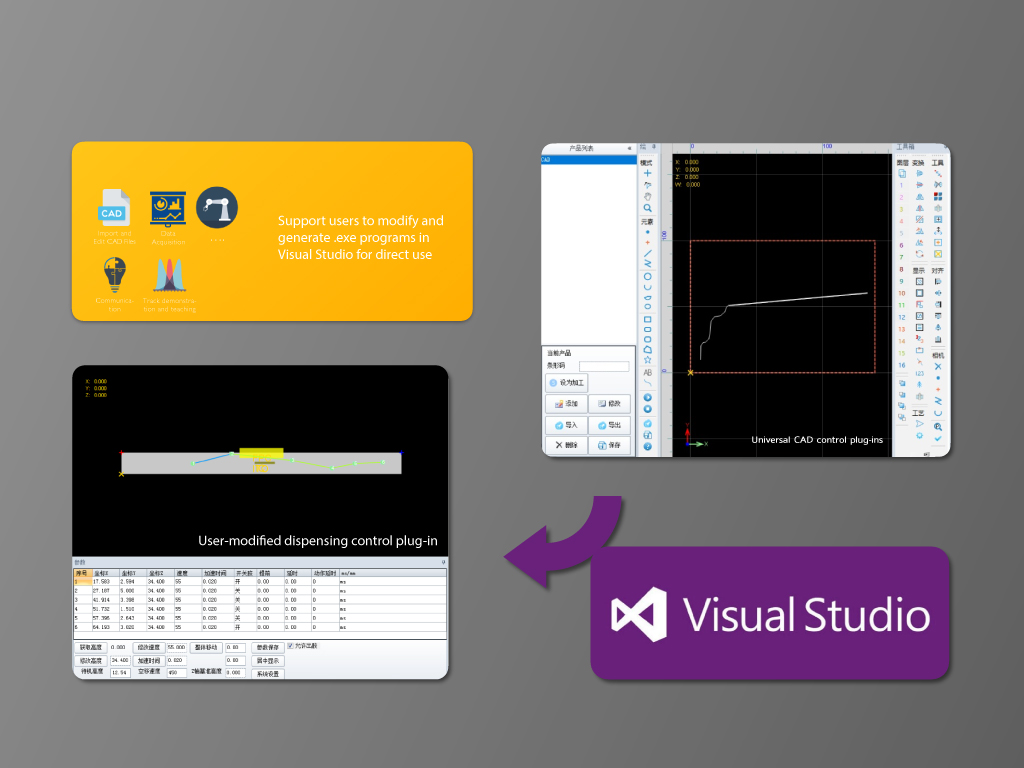
In the case of the dispensing industry application shown below, the user can import or draw motion trajectories and convert them directly into axis motion data by using the CAD controls in the built-in control library that is called. Users can also modify the built-in controls through an open interface to make the standard CAD controls into industry controls suitable for dispensing industry applications, adding a list of dispensing-related instructional information, color enhancement of paths and gold finger positions, and other information to make it easier to use.
In the built-in framework of the V510 series controller, the list of "variables" used in the PLC can be exported to a file, which can be modified and saved by the user in Visual Studio and then read or written directly in the program.
In addition to shortening the execution cycle time and improving the stability of the system, user programs based on real-time systems can perform functions that are difficult to achieve with traditional motion control card solutions, such as.
A. The sensor in place signal often used in turntable or assembly line equipment, the pulse signal capture of traditional solutions is easily affected by the Windows execution cycle jitter. Real-time systems can achieve a stable pulse capture function similar to what can only be achieved by PLC.
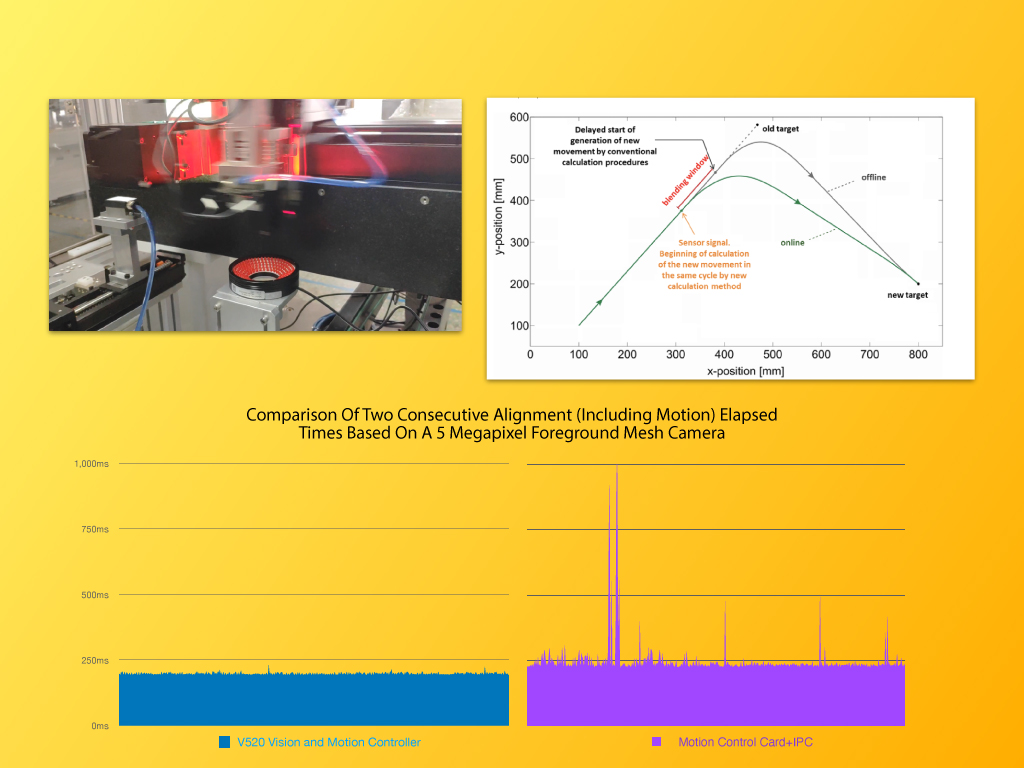
B. Users in the field of machine vision can recompile their vision algorithms in the real-time system and achieve efficient and stable interaction between machine vision functions and other functional modules of the equipment (such as motion control) by calling the real-time GigE protocol of the V510 series controller.
The following figure shows the comparison of SMT equipment execution cycle, running in the real-time system of machine vision and motion control, can get better machine operation results.
C. For customers in the field of motion control, they can run their own robot following algorithm in the real-time system, and achieve more stable and accurate motion control by calling the N axis interpolation in the V510 series controller.
D. Users can manage the network ports and serial ports by the real-time system, which is suitable for applications requiring high-speed and stable communication.
The V510 series controller combines European motion algorithms, path optimization for 3D space, and a visual interface for path file import and teaching, allowing users to easily and conveniently customize dispensing controls, which will be very promising in the dispensing industry.
The V510 series controller is based on the real-time system's mimeograph technology, S-shaped speed profile planning, and 64-axis EtherCAT and pulse motion control.
And the V510 series controller can be used in a wide range of industrial applications where precision measurement is required, including precise position comparison output during motion control, real-time interaction between motion control and vision, analog measurements, and abnormal power-down data retention.
Future Robot Technology Co., Limited (Future Robot in short) is a high-tech innovation enterprise focusing on Intelligent Manufacturing and Artificial Intelligence. Future Robot, with strong R&D capability and market demand-orientation, design and provide worldwide enterprises and individual users with embedded products which are for Industrial Automation, Robot, Machine Vision, Medical Application, Intelligent Transportation, Education and Internet of Things applications.
Expert team with rich experiences in Machine Vision, Motion Control and Edge Computing:
Hardware engineering team
- x86, FPGA, DSP, Layout and testing Engineers
Software engineering team
- BIOS engineers, FPGA, DSP, Algorithm software engineers and system development engineers.
Industrial and structure design engineering team
- structure design, multi board and model design


 ApplicationsProcessorsFeaturesApplicationsRugged Embedded Computing
ApplicationsProcessorsFeaturesApplicationsRugged Embedded Computing







